3.3 转速、电流双闭环调速系统稳态分析
1.稳态结构图
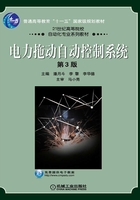
根据图2-34,可以很容易地画出稳态时的转速、电流双闭环调速系统稳态结构图,如图3-6所示。
2.稳态特性方程
分析稳态特性的关键是掌握该PI调节器的稳态特征,一般存在两种状况:饱和(输出达到限幅值)、不饱和(输出未达到限幅值)。当调节器饱和时,输出为恒值,输入量的变化不再影响输出,除非有反向的输入信号使调节器退出饱和,这相当于饱和的调节器暂时隔断了系统输入和输出间的联系,使该系统处开环状态,失去调节作用(或称为饱和非线性控制作用)。当调节器不饱和时,PI的作用使输入偏差电压ΔU在稳态时总为零。

图3-6 双闭环直流调速系统的稳态结构框图
实际上,在正常运行时,电流调节器是不会达到饱和状态的。然而,对于稳态特性来说,转速调节器有不饱和与饱和两种情况。
(1)转速调节器不饱和
此时两个调节器都不饱和,稳态时,它们的输入偏差电压都是零,因此


由式(3-21)可得

从而得到图3-7所示的稳态特性的n0A段。由于ASR不饱和, ,Id<Idm,因而可知,n0A段特性从理想空载状态的Id=0一直延续到Id=Idm,通常,Idm都是大于额定电流IdN的,这就是稳态特性的运行段,它是一条水平的特性曲线。
,Id<Idm,因而可知,n0A段特性从理想空载状态的Id=0一直延续到Id=Idm,通常,Idm都是大于额定电流IdN的,这就是稳态特性的运行段,它是一条水平的特性曲线。
(2)转速调节器饱和
这时,ASR输出达到限幅值 ,转速外环呈开环状态,双闭环系统变成一个电流无静差的电流单闭环调节系统。稳态时有
,转速外环呈开环状态,双闭环系统变成一个电流无静差的电流单闭环调节系统。稳态时有

式中,最大电流Idm是选定的,取决于电动机的容许过载能力和拖动系统允许的最大加速度。式(3-23)所描述的稳态特性对应于图3-7中的AB段,它是一条垂直的特性曲线。这样的下垂特性只适合于n<n0的情况,因为如果n>n0,则Un> ,ASR将退出饱和状态。
,ASR将退出饱和状态。
双闭环调速系统的稳态特性在负载电流小于Idm时表现为转速无静差,这时,转速负反馈起主要调节作用。当负载电流达到Idm时,对应于转速调节器的饱和输出 ,这时,电流调节器起主要调节作用,系统表现为电流无静差,并获得过电流的自动保护。这就是采用了两个PI调节器分别形成内、外两个闭环的效果,其稳态特性(见图3-7)显然比带电流截止负反馈的单闭环系统稳态特性好。
,这时,电流调节器起主要调节作用,系统表现为电流无静差,并获得过电流的自动保护。这就是采用了两个PI调节器分别形成内、外两个闭环的效果,其稳态特性(见图3-7)显然比带电流截止负反馈的单闭环系统稳态特性好。

图3-7 转速、电流双闭环直流调速系统的稳态特性
【例3-4】在转速电流双闭环直流调速系统中,ASR和ACR均采用PI调节器,已知电动机额定参数为UN、IN、nN、Ra,功率放大器放大系数Ks和内阻Rrec,电动机的允许过载系数λ=1.5。
1)若ASR、ACR的限幅输出分别为 和Uctm,如何确定转速反馈系数α和电流反馈系数β。
和Uctm,如何确定转速反馈系数α和电流反馈系数β。
2)设系统拖动恒转矩负载在额定情况下正常运行,若因为某种原因励磁电流减小使磁通Φ下降一半,系统工作情况如何变化?写出 、Uct、Ud、Id及n在稳定后的表达式。
、Uct、Ud、Id及n在稳定后的表达式。
解:1)按最大给定电压 对应电动机额定转速nN来确定转速反馈系数,ASR采用PI调节器,稳态时
对应电动机额定转速nN来确定转速反馈系数,ASR采用PI调节器,稳态时 =Un=αn,因此有
=Un=αn,因此有 =αnN,所以α=
=αnN,所以α= 。
。
按电动机最大允许过载电流Idm对应于ASR输出限幅值 来确定电流反馈系数β,而ACR又采用PI调节器,则有
来确定电流反馈系数β,而ACR又采用PI调节器,则有 =Uim=βIdm=β×1. 5IN,所以有β=
=Uim=βIdm=β×1. 5IN,所以有β= /(1. 5IN)。
/(1. 5IN)。
2)系统在额定情况下正常运行,n=nN,Id=IN。若磁通Φ下降一半,则E=KeΦn下降,Id和Ui将随之增加,但因 未变,在电流环调节作用下使Ud、Uct下降以维持Id=IN暂时不变,从而使Ted=KmΦIN下降为原来的一半。电动机拖动恒转矩负载,TL不变;所以Ted<TL,电动机减速,n下降,Un随之下降,因
未变,在电流环调节作用下使Ud、Uct下降以维持Id=IN暂时不变,从而使Ted=KmΦIN下降为原来的一半。电动机拖动恒转矩负载,TL不变;所以Ted<TL,电动机减速,n下降,Un随之下降,因 未变,而使ASR饱和,输出为
未变,而使ASR饱和,输出为 ,在电流环调节作用下,电流上升达到Idm=1. 5IN并维持不变,Ted因电流变大而回升,但也只能为原来转矩的75%(0. 5×1. 5=0. 75),仍然小于负载转矩TL,电动机转速将继续下降,直至n=0。这时,
,在电流环调节作用下,电流上升达到Idm=1. 5IN并维持不变,Ted因电流变大而回升,但也只能为原来转矩的75%(0. 5×1. 5=0. 75),仍然小于负载转矩TL,电动机转速将继续下降,直至n=0。这时, ,Id=Idm=1. 5IN,Ud=IdmR=1. 5INR,Uct=Ud/Ks=1. 5INR/Ks。
,Id=Idm=1. 5IN,Ud=IdmR=1. 5INR,Uct=Ud/Ks=1. 5INR/Ks。
以上分析了转速、电流双闭环直流调速系统的稳态运行情况,可知这种系统具有优良静特性,从而得到了最广泛的应用。下一章将重点研究这种系统的动态特性。